Retinal image registration based on keypoint correspondences, spherical eye modeling and camera pose estimation
Abstract
For the final version of the method, please see this publication.
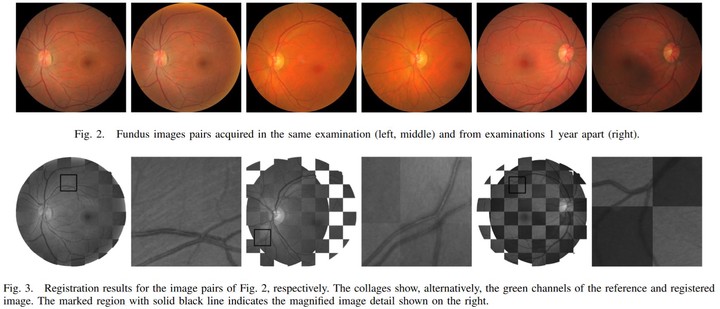
In this work, an image registration method for two retinal images is proposed. The proposed method utilizes keypoint correspondences and assumes a spherical model of the eye. Image registration is treated as a pose estimation problem, which requires estimation of the rigid transformation that relates the two images. Using this estimate, one image can be warped so that it is registered to the coordinate frame of the other. Experimental evaluation shows improved accuracy over state-of-the-art approaches as well as robustness to noise and spurious keypoint correspondences. Experiments also indicate the method’s applicability to diagnostic image enhancement and comparative analysis of images from different examinations.